极海APM32F035电机控制开发板评测 02 串口终端打印测试
极海APM32F035电机控制开发板评测 02 串口打印测试
1. 软硬件平台
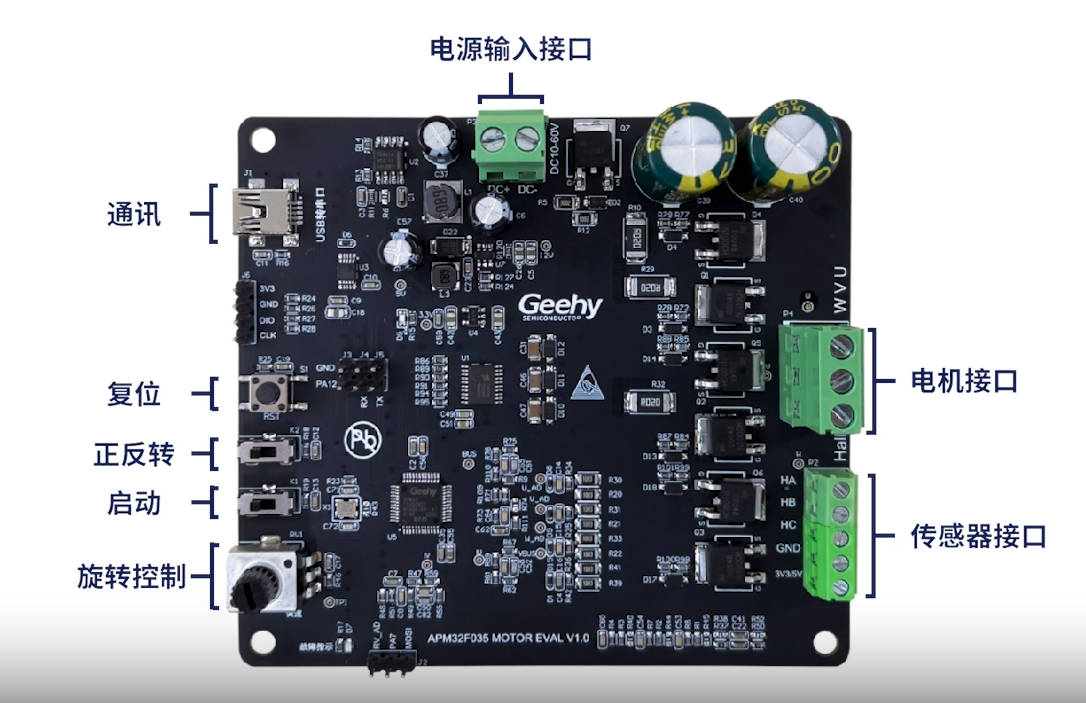
极海APM32F035电机控制开发板
MDK-ARM Keil
2. 串口终端调试
串口打印在多个领域和场景中发挥着重要作用,尤其在嵌入式系统、硬件调试、软件开发以及通信协议测试等方面。以下是串口打印的主要作用:
- 调试与排错:在嵌入式系统或硬件设备的开发过程中,串口打印是一种常用的调试手段。通过串口打印,开发者可以实时查看设备的运行状态、变量值、错误信息等,从而快速定位问题所在,进行排错和修复。
- 信息展示:对于一些需要与用户交互的设备,串口打印可以用于显示设备的工作状态、提示信息、参数设置等。这有助于用户了解设备的运行情况,进行正确的操作。
- 通信协议测试:在通信协议的开发和测试过程中,串口打印可以用于监视通信数据的发送和接收情况。通过对比发送和接收的数据,开发者可以验证通信协议的正确性和可靠性。
- 日志记录:在某些应用中,串口打印还可以用于记录设备的运行日志。这些日志对于后续的故障分析、性能优化等方面具有很高的价值。
- 配置与更新:一些设备可能支持通过串口接收配置信息或进行软件更新。在这种情况下,串口打印可以用于显示配置过程中的信息或更新进度。
需要注意的是,虽然串口打印在开发过程中具有重要的作用,但在实际应用中也需要考虑到其可能带来的性能开销和安全隐患。因此,在设计和实现串口打印功能时,需要权衡其利弊,确保其在满足需求的同时不会对系统造成过大的负担。
3. APM32F035开发板 USART串口
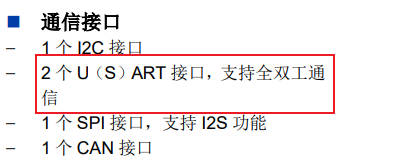
APM32F035芯片提供了两个串口
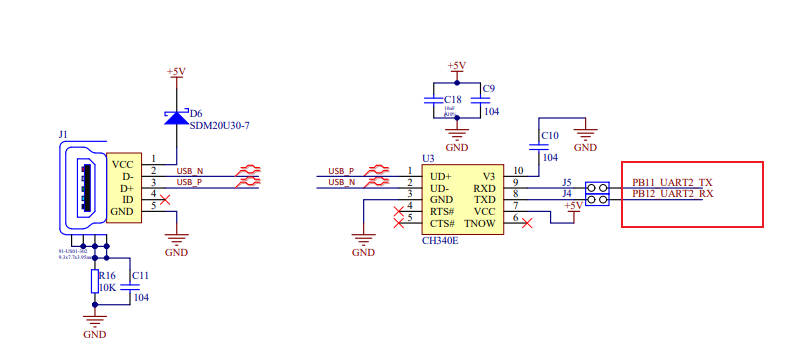
开发板硬件串口电路
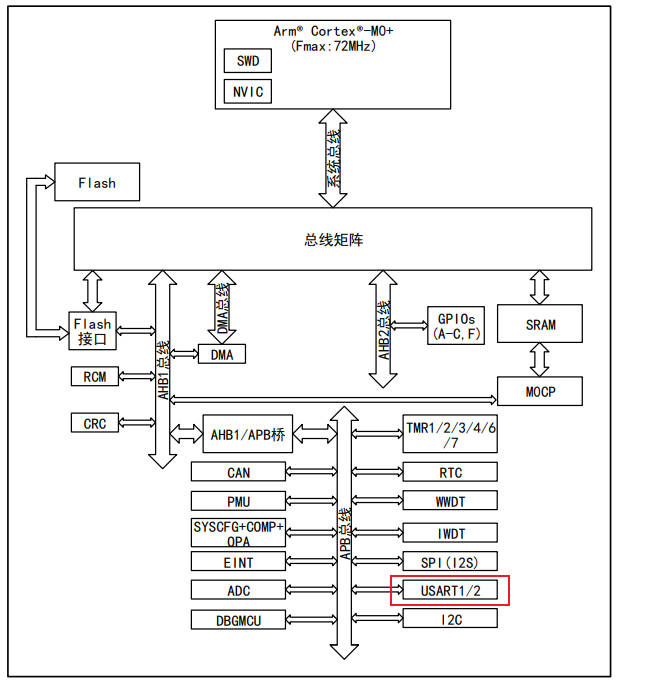
APM32F035芯片 USART串口挂载AHB总线下面
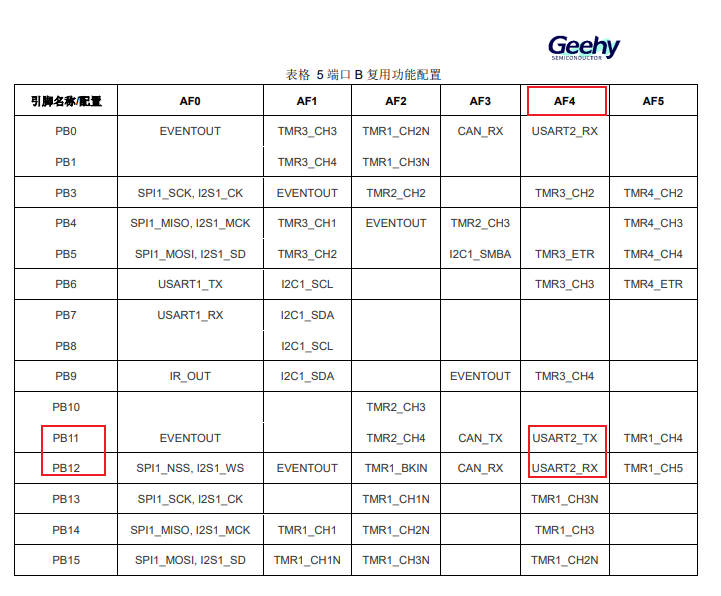
使用PB11,PB12作为串口功能时,需要对GPIO端口功能进行复用
下图可以看到PB11,PB12可以作为串口2的TX,RX,同时也是CAN总线的TX,RX
4. 快速移植串口打印测试代码
在之前的led工程模板上进行复制,并修改名称为apm32f035-usart-printf-templatem
打开工程,并定位到board_apm32f035_mini.c board_apm32f035_mini.h文件,修改里面的东西
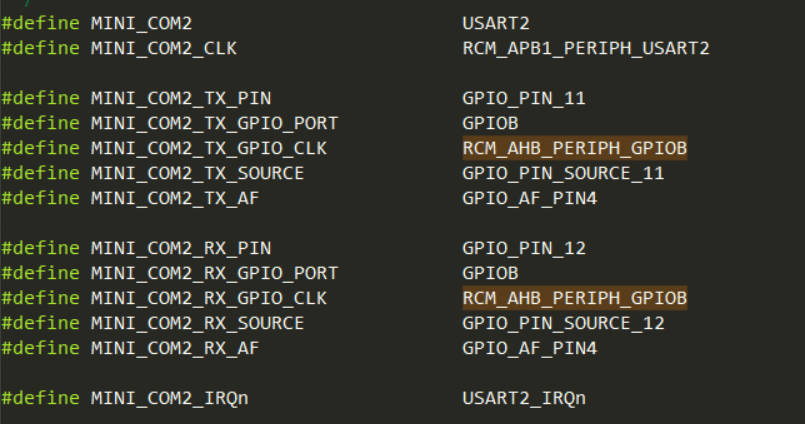
(1) 修改串口2的宏定义
(2) 修改GPIO端口复用功能
(3) 修改时钟
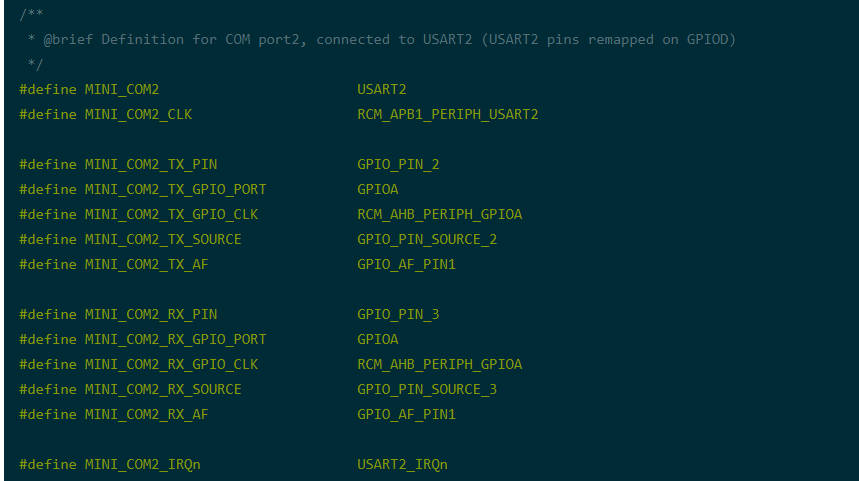
由于官方提供的SDK中的代码,并不是直接适配到apm32f035电机开发板的,因此需要修改,下面是原始的串口2,使用是PA2,PA3作为串口功能使用,但是在电机开发板中是使用PB11,PB12端口,因此需要进行修改。
初始化串口函数,进行GPIO,USART串口配置
工程模板里面是使用了COM作为参数进行初始化的,这里面好处是可以调用函数,进行同时配置。这样子的编写代码方法可以参考。
相关的变量或者宏定义如下
USART_T* COM_USART[COMn] = {MINI_COM1, MINI_COM2};
GPIO_T* COM_TX_PORT[COMn] = {MINI_COM1_TX_GPIO_PORT, MINI_COM2_TX_GPIO_PORT};
GPIO_T* COM_RX_PORT[COMn] = {MINI_COM1_RX_GPIO_PORT, MINI_COM2_RX_GPIO_PORT};
const uint32_t COM_USART_CLK[COMn] = {MINI_COM1_CLK, MINI_COM2_CLK};
const RCM_AHB_PERIPH_T COM_TX_PORT_CLK[COMn] = {MINI_COM1_TX_GPIO_CLK, MINI_COM2_TX_GPIO_CLK};
const RCM_AHB_PERIPH_T COM_RX_PORT_CLK[COMn] = {MINI_COM1_RX_GPIO_CLK, MINI_COM2_RX_GPIO_CLK};
const GPIO_PIN_T COM_TX_PIN[COMn] = {MINI_COM1_TX_PIN, MINI_COM2_TX_PIN};
const GPIO_PIN_T COM_RX_PIN[COMn] = {MINI_COM1_RX_PIN, MINI_COM2_RX_PIN};
const GPIO_PIN_SOURCE_T COM_TX_PIN_SOURCE[COMn] = {MINI_COM1_TX_SOURCE, MINI_COM2_TX_SOURCE};
const GPIO_PIN_SOURCE_T COM_RX_PIN_SOURCE[COMn] = {MINI_COM1_RX_SOURCE, MINI_COM2_RX_SOURCE};
const GPIO_AF_T COM_TX_AF[COMn] = {MINI_COM1_TX_AF, MINI_COM2_TX_AF};
const GPIO_AF_T COM_RX_AF[COMn] = {MINI_COM1_RX_AF, MINI_COM2_RX_AF};
#define COMn 2
/**
* @brief Definition for COM port1, connected to USART1
*/
#define MINI_COM1 USART1
#define MINI_COM1_CLK RCM_APB2_PERIPH_USART1
#define MINI_COM1_TX_PIN GPIO_PIN_9
#define MINI_COM1_TX_GPIO_PORT GPIOA
#define MINI_COM1_TX_GPIO_CLK RCM_AHB_PERIPH_GPIOA
#define MINI_COM1_TX_SOURCE GPIO_PIN_SOURCE_9
#define MINI_COM1_TX_AF GPIO_AF_PIN1
#define MINI_COM1_RX_PIN GPIO_PIN_10
#define MINI_COM1_RX_GPIO_PORT GPIOA
#define MINI_COM1_RX_GPIO_CLK RCM_AHB_PERIPH_GPIOA
#define MINI_COM1_RX_SOURCE GPIO_PIN_SOURCE_10
#define MINI_COM1_RX_AF GPIO_AF_PIN1
#define MINI_COM1_IRQn USART1_IRQn
/**
* @brief Definition for COM port2, connected to USART2 (USART2 pins remapped on GPIOD)
*/
#define MINI_COM2 USART2
#define MINI_COM2_CLK RCM_APB1_PERIPH_USART2
#define MINI_COM2_TX_PIN GPIO_PIN_11
#define MINI_COM2_TX_GPIO_PORT GPIOB
#define MINI_COM2_TX_GPIO_CLK RCM_AHB_PERIPH_GPIOB
#define MINI_COM2_TX_SOURCE GPIO_PIN_SOURCE_11
#define MINI_COM2_TX_AF GPIO_AF_PIN4
#define MINI_COM2_RX_PIN GPIO_PIN_12
#define MINI_COM2_RX_GPIO_PORT GPIOB
#define MINI_COM2_RX_GPIO_CLK RCM_AHB_PERIPH_GPIOB
#define MINI_COM2_RX_SOURCE GPIO_PIN_SOURCE_12
#define MINI_COM2_RX_AF GPIO_AF_PIN4
#define MINI_COM2_IRQn USART2_IRQn
typedef enum
{
COM1 = 0,
COM2 = 1
} COM_T;void APM_MINI_COMInit(COM_T COM)
{
GPIO_Config_T gpioConfig;
USART_Config_T usartConfigStruct;
/* Enable GPIO clock */
RCM_EnableAHBPeriphClock(COM_TX_PORT_CLK[COM] | COM_RX_PORT_CLK[COM]);
/* Enable COM1 or COM2 clock */
if (COM == COM1)
{
RCM_EnableAPB2PeriphClock(COM_USART_CLK[COM]);
}
else
{
RCM_EnableAPB1PeriphClock(COM_USART_CLK[COM]);
}
/* Connect PXx to USARTx_Tx */
GPIO_ConfigPinAF(COM_TX_PORT[COM], COM_TX_PIN_SOURCE[COM], COM_TX_AF[COM]);
/* Connect PXx to USARTx_Rx */
GPIO_ConfigPinAF(COM_RX_PORT[COM], COM_RX_PIN_SOURCE[COM], COM_RX_AF[COM]);
/* Configure USART Tx as alternate function push-pull */
gpioConfig.mode = GPIO_MODE_AF;
gpioConfig.pin = COM_TX_PIN[COM];
gpioConfig.speed = GPIO_SPEED_50MHz;
gpioConfig.outtype = GPIO_OUT_TYPE_PP;
gpioConfig.pupd = GPIO_PUPD_PU;
GPIO_Config(COM_TX_PORT[COM], &gpioConfig);
/* Configure USART Rx as input floating */
gpioConfig.pin = COM_RX_PIN[COM];
GPIO_Config(COM_RX_PORT[COM], &gpioConfig);
/* MINI_USARTs configured as follow:
- BaudRate = 115200 baud
- Word Length = 8 Bits
- One Stop Bit
- No parity
- Hardware flow control disabled (RTS and CTS signals)
- Receive and transmit enabled
*/
usartConfigStruct.baudRate = 115200;
usartConfigStruct.mode = USART_MODE_TX_RX;
usartConfigStruct.hardwareFlowCtrl = USART_FLOW_CTRL_NONE;
usartConfigStruct.parity = USART_PARITY_NONE;
usartConfigStruct.stopBits = USART_STOP_BIT_1;
usartConfigStruct.wordLength = USART_WORD_LEN_8B;
USART_Config(COM_USART[COM], &usartConfigStruct);
/* Enable USART_Interrupt_RXBNEIE */
USART_EnableInterrupt(COM_USART[COM], USART_INT_RXBNEIE);
if (COM_USART[COM] == USART1)
{
NVIC_EnableIRQRequest(USART1_IRQn, 2);
}
else if (COM_USART[COM] == USART2)
{
NVIC_EnableIRQRequest(USART2_IRQn, 3);
}
/* Enable USART */
USART_Enable(COM_USART[COM]);
}
调用APM_MINI_COMInit函数,同时需要配置串口打印的函数(完成printf重定向,官方代码已经提供)
在下面的代码,对不同类型的编译器都进行了处理,在KEIL中进行printf重定向是通过fputc完成的,但是在gcc环境中是通过write完成的。
下面的DEBUG_USART使用是MINI_COM2与开发板的接口一一对应。
#if defined (__CC_ARM) || defined (__ICCARM__) || (defined(__ARMCC_VERSION) && (__ARMCC_VERSION >= 6010050))
/*!
* @brief Redirect C Library function printf to serial port.
* After Redirection, you can use printf function.
*
* @param ch: The characters that need to be send.
*
* @param *f: pointer to a FILE that can recording all information
* needed to control a stream
*
* @retval The characters that need to be send.
*
* @note
*/
int fputc(int ch, FILE* f)
{
/* send a byte of data to the serial port */
USART_TxData(DEBUG_USART, (uint8_t)ch);
/* wait for the data to be send */
while (USART_ReadStatusFlag(DEBUG_USART, USART_FLAG_TXBE) == RESET);
return (ch);
}
#elif defined (__GNUC__)
/*!
* @brief Redirect C Library function printf to serial port.
* After Redirection, you can use printf function.
*
* @param ch: The characters that need to be send.
*
* @retval The characters that need to be send.
*
* @note
*/
int __io_putchar(int ch)
{
/* send a byte of data to the serial port */
USART_TxData(DEBUG_USART, ch);
/* wait for the data to be send */
while (USART_ReadStatusFlag(DEBUG_USART, USART_FLAG_TXBE) == RESET);
return ch;
}
/*!
* @brief Redirect C Library function printf to serial port.
* After Redirection, you can use printf function.
*
* @param file: Meaningless in this function.
*
* @param *ptr: Buffer pointer for data to be sent.
*
* @param len: Length of data to be sent.
*
* @retval The characters that need to be send.
*
* @note
*/
int _write(int file, char* ptr, int len)
{
int i;
for (i = 0; i < len; i++)
{
__io_putchar(*ptr++);
}
return len;
}
#else
#warning Not supported compiler type
#endif
5.测试代码
- 主函数
#include "main.h"
#include "bsp_delay.h"
#include "apm32f035_rcm.h"
#include "apm32f035_gpio.h"
#include "apm32f035_misc.h"
#include <stdio.h>
#include <string.h>
/* printf using USART1 */
#define DEBUG_USART MINI_COM2
void APM_MINI_Init(void);
void GPIO_Init(void);
void APM_MINI_Init(void)
{
/* Init delay function */
APM_MINI_DelayInit();
APM_MINI_PBInit(BUTTON_KEY1, BUTTON_MODE_GPIO);
APM_MINI_COMInit(COM2);
}
void GPIO_Init(void)
{
GPIO_Config_T gpioConfig;
RCM_EnableAHBPeriphClock(LED2_GPIO_CLK | LED3_GPIO_CLK);
/* LED2 GPIO configuration */
gpioConfig.pin = LED2_PIN;
gpioConfig.mode = GPIO_MODE_OUT;
gpioConfig.outtype = GPIO_OUT_TYPE_PP;
gpioConfig.speed = GPIO_SPEED_50MHz;
gpioConfig.pupd = GPIO_PUPD_NO;
GPIO_Config(LED2_GPIO_PORT, &gpioConfig);
/* LED3 GPIO configuration */
//gpioConfig.pin = LED3_PIN;
//GPIO_Config(LED3_GPIO_PORT, &gpioConfig);
}
/*!
* Main program
*/
int main(void)
{
APM_MINI_Init();
GPIO_Init();
printf("Hardware_Init [ok] \r\n");
printf("apm32f035-motor board testing 2024-03-31\r\n");
printf("This is an example of GPIO toggle \r\n");
while (1)
{
/* Turn LED2 on */
GPIO_ClearBit(LED2_GPIO_PORT, LED2_PIN);
printf("LED2 ON [ok] \r\n");
/* Turn LED3 off */
//GPIO_SetBit(LED3_GPIO_PORT, LED3_PIN);
APM_MINI_DelayMs(500);
/* Turn LED2 off */
GPIO_SetBit(LED2_GPIO_PORT, LED2_PIN);
printf("LED2 OFF [ok] \r\n");
/* Turn LED3 on */
//GPIO_ClearBit(LED3_GPIO_PORT, LED3_PIN);
APM_MINI_DelayMs(500);
}
}
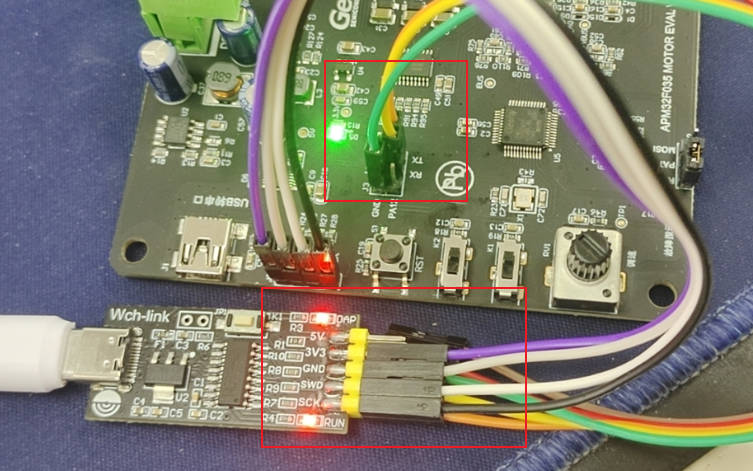
- 测试效果
使用的WCH-LINK下载器,这个工具既可以下载程序,同时也支持串口,当然了板载的USB口也可以使用,但是板载串口的接口还是老式的Micro,感觉可以优化成Type-C接口。
完成串口打印功能,对后面进行电机调试也有不少好处,进行了就是对于电机进行简单驱动了,个人对于无刷电机的了解不多,更多的需要查看官方例程代码进行学习了,计划后面先驱动一下电机,(电机已经到了),同时计划与武汉芯源的CW32-BLDC电机开发板进行一下对比,(计划来个两篇文章)同时也是完成原始的评测计划,短时间对于电机研究可能来不及,平时也有其他的事情干。